Safety, Exploration and Maintenance of Forests with Ecological Robotics
Segurança, Exploração e Manutenção de Florestas com Integração de Robótica Ecológica
Designação do Projeto
SEMFIRE .: Segurança, Exploração e Manutenção de Florestas com Integração de Robótica Ecológica
Código do Projeto
CENTRO-01-0247-FEDER-032691

Overview
SEMFIRE (Safety, Exploration and Maintenance of Forests with the Integration of Ecological Robotics) proposes the development of a support robotic system to reduce fuel accumulation (e.g., forest debris), thus assisting in landscaping maintenance tasks. This is an application domain with an unquestionable beneficial impact at the economic, social and environmental level, as the proposed project will contribute by significantly reducing wildfire hazard potential.
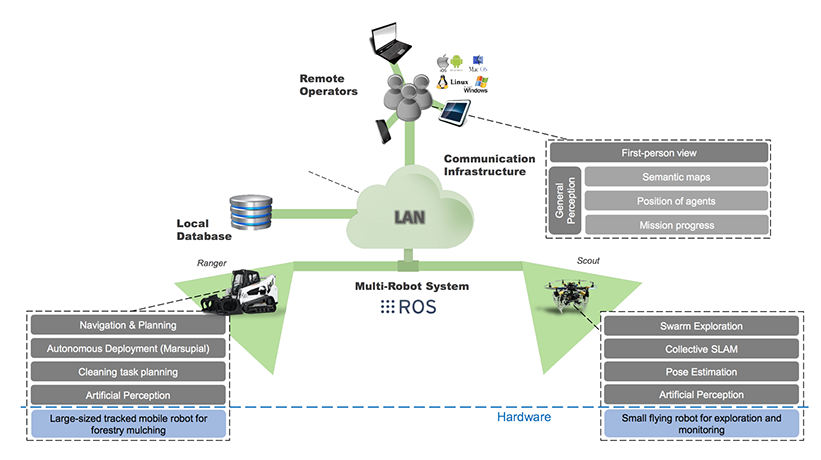
SEMFIRE addresses several disciplines to succeed in fire prevention by benefiting from disruptive technologies and novel ecological robotic approaches. Focus will be placed in the development of a multi-robot system, combined with pervasive local positioning, multi-robot navigation and coordination in forests, and an innovative artificial perception architecture.
SEMFIRE is a project of the Central Portugal Region cofunded by the program Portugal 2020, under the reference
CENTRO-01-0247-FEDER-032691
Objectives
Aiming to push forward the development of field robotics to cope with forestry fires, a scourge with unquestionable impact on society, a consortium was assembled to fulfill the following specific scientific objectives:
Design and develop a heterogeneous team of robotic platforms for forest clearing, reconnaissance and surveillance
Integrate the latest advancements in traversability analysis, path-planning and navigation of field robots in outdoor terrains
Develop a marsupial deployment strategy in forestry areas
Implement a swarm exploration and coverage algorithms for collective reconnaissance and surveillance of forestry areas
Implement innovative computer vision methods for detection, identification and characterization of the environment needed for landscape maintenance procedures
Research
Europe has been affected by an alarming number of wildfires every year, ravaging nearly half a million hectares of forestry areas and resulting in an unacceptable amount of human losses. The year 2017 was one of the worst ever recorded, with devastating wildfires raging across the globe. Bearing these shocking facts in mind, this position paper aims to lay the foundations of crucial new upcoming research in the field of forestry robotics by presenting an overview of the SEMFIRE project. SEMFIRE proposes the development of a robotic system designed to reduce the accumulation of combustible material in forests, thus assisting in landscaping maintenance tasks for wildfire prevention. This paper describes the multi-robot system envisaged by SEMFIRE, combined with pervasive local positioning, multi-robot navigation and coordination in forests, and an innovative artificial perception architecture.
TEAM


João FILIPE FERREIRA
University of Coimbra
Principal Investigator

MICAEL COUCEIRO
INGENIARIUS
Coordinator
João BAndeirinha
SFERA ULTIMATE


daryna datsenko
INGENIARIUS


FILIPE PINTO
INGENIARIUS
ANDré AraúJO
INGENIARIUS

NUNO GONçALVES
University of Coimbra
DAVID PORTUGAL
University of Coimbra
RUI ROCHA
University of Coimbra
Luís Duarte
SFERA ULTIMATE
FILIPE SANTOS
SFERA ULTIMATE
our partners
This project is only possible with the collaboration of two local government councils which will provide all necessary forestry areas to evaluate the SEMFIRE solution:
Góis Parish Council - Freguesia de Góis
Municipal Council of Penacova - Município de Penacova
Integrated within Tulipp's Ecosystem

JOÃO PEDRO
SFERA ULTIMATE
Publications
Couceiro, M. S., Portugal, D., Ferreira, J. F., & Rocha, R. P. SEMFIRE: towards a new generation of forestry maintenance multi-robot systems, in 2019 IEEE. In SICE International Symposium on System Integration (SII)(IEEE, Paris, 2019) (pp. 270-276).
Martins, G. S., Ferreira, J. F., Portugal, D., & Couceiro, M. S. (2019). MoDSeM: modular framework for distributed semantic mapping. Poster Papers, 12.
Martins, G. S., Ferreira, J. F., Portugal, D., & Couceiro, M. S. (2019, July). MoDSeM: towards semantic mapping with distributed robots. In Annual Conference Towards Autonomous Robotic Systems (pp. 131-142). Springer, Cham.
Portugal, D., Ferreira, J. F., & Couceiro, M. S. (2020, September). Requirements specification and integration architecture for perception in a cooperative team of forestry robots. In Annual Conference Towards Autonomous Robotic Systems (pp. 329-344). Springer, Cham.
Nasir, A. K., Araújo, A. G., & Couceiro, M. S. (2020, October). Localization and navigation assessment of a heavy-duty field robot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), Workshop on Perception, Planning and Mobility in Forestry Robotics (WPPMFR 2020) (pp. 25-29).
Andrada, M. E., De Castro Cardoso Ferreira, J., Portugal, D., & Couceiro, M. (2020). Testing different CNN architectures for semantic segmentation for landscaping with forestry robotics.
Lourenço, D., De Castro Cardoso Ferreira, J., & Portugal, D. (2020). 3D local planning for a forestry UGV based on terrain gradient and mechanical effort.
Portugal, D., Andrada, M. E., Araújo, A. G., Couceiro, M. S., & Ferreira, J. F. (2021). Ros integration of an instrumented bobcat t190 for the semfire project. In Robot Operating System (ROS) (pp. 87-119). Springer, Cham.
Andrada, M. E., Ferreira, J. F., Portugal, D., & Couceiro, M. S. (2022, January). Integration of an Artificial Perception System for Identification of Live Flammable Material in Forestry Robotics. In 2022 IEEE/SICE International Symposium on System Integration (SII) (pp. 103-108). IEEE.
Karfakis, P. T., Couceiro, M. S., Portugal, D., & Antunes, C. H. (2022, March). A Comparative Study of Mobile Robot Positioning Using 5G NR. In ICRA 2022 Workshop in Innovation in Forestry Robotics: Research and Industry Adoption.
Bittner, D., Ferreira, J. F., Andrada, M. E., Bird, J. J., & Portugal, D. (2022, March). Generating Synthetic Multispectral Images for Semantic Segmentation in Forestry Applications. In ICRA 2022 Workshop in Innovation in Forestry Robotics: Research and Industry Adoption.
Andrada, M. E., Ferreira, J. F., Kantor, G., Portugal, D., & Antunes, C. H. (2022, March). Model Pruning in Depth Completion CNNs for Forestry Robotics with Simulated Annealing. In ICRA 2022 Workshop in Innovation in Forestry Robotics: Research and Industry Adoption.
Invited Talks:
Ferreira, J. F. (2019). “Forestry 4.0” – Going Beyond Smart Agriculture. Invited Talk. Smart Industry Workshop, Nottingham Trent University, United Kingdom.
Deliverables
Requirements of System and Scenarios of Use
Functional and Technical Specification
Artificial Perception System and Robotic Decision-Making – Artificial Perception Base System
Multi-Robot Exploration, Patrolling and Localization System
Initial Deployment of Scouts under Connectivity Constraints
Plan of dissemination and disclosure enlarged from results
Contents multimedia for disclosure of prototype
CONTACT INFO
QUICK MESSAGE
Rua Nossa Senhora da Conceição 146
4445-147 Alfena
Portugal
Mobile Phone: + 351 961 171 409
Email: semfire@ingeniarius.pt
All rights reserved